Second order signaling and Runaway Signals
julien Lie-Panis & jean-louis Dessalles
This is the companion Website for the article:
Runaway signals: Exaggerated displays of commitment may result from second-order signaling
The program used for these simulations is based on the Evolife platform developed at Telecom-Paris (Institut Polytechnique de Paris).
|
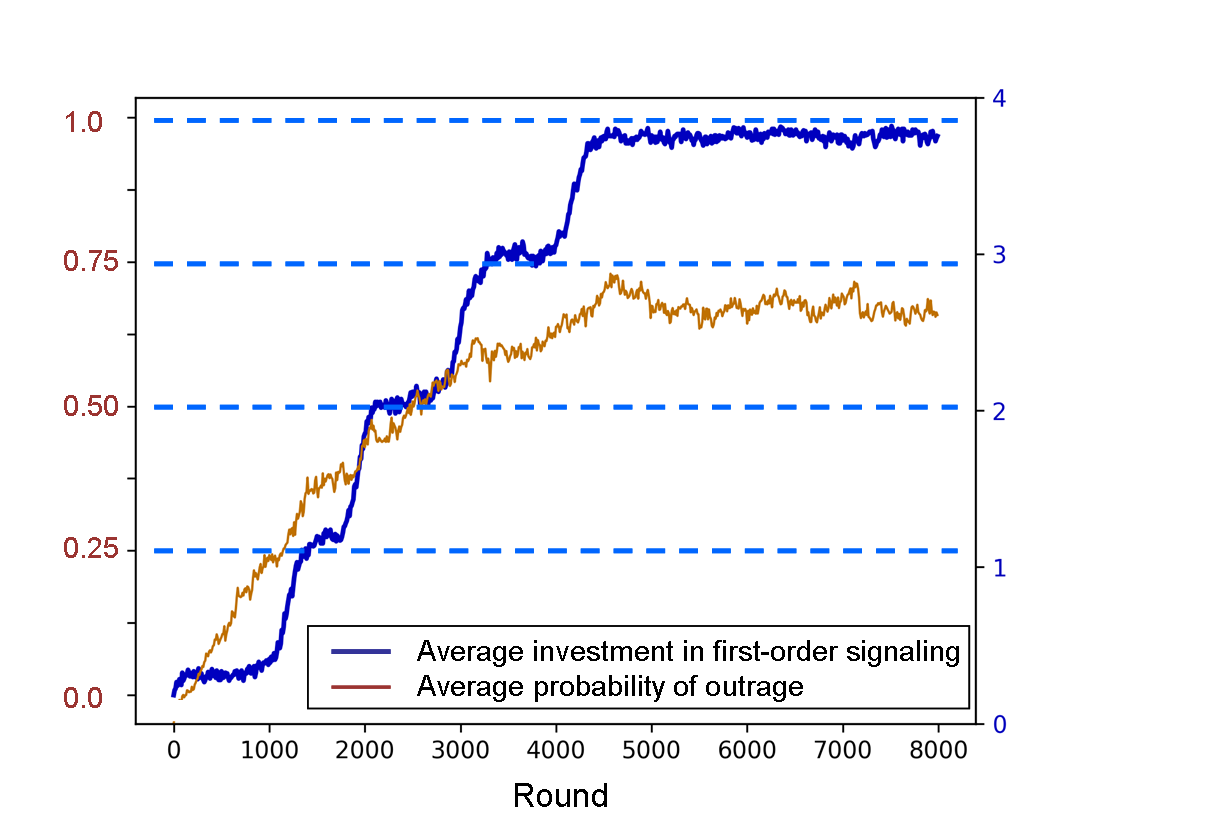
Effect of outrage on commitment signals
|
Evolution with default parameters. When uniform signal is reached, outrage is theoretically expected to be pointless, as there is no-one to be outraged at. We indeed observe a drop of outrage probality. However, some individuals do not signal from time to time due to learning exploration. This helps maintain a certain level of outrage.
red dots are outraged individuals - brown dots are their targets |
| parameter | value | meaning |
| ContemptImpact | -30 | harming effect of outrage (\(h\)) |
| CostDecrease | 5 | signal cost inequality between low- and high-quality individuals |
| FollowerImpact | 10 | advantage for attracting an affiliate (\(s\)) |
| FollowingImpact | 0 | advantage coefficient for becoming affiated affiated with a high-quality individual |
| JumpProbability | 5 | probability of trying any value during learning |
| LearningSpeed | 20 | maximal additive exploration during learning |
| MaxFollowers | 5 | maximal number of incoming affiliations |
| MaxFriends | 2 | maximal number of individuals to affiliate with |
| NbAgents | 200 | size of the population |
| NumberOfGroups | 5 | number of groups |
| PolicingCost | -5 | cost of outrage (\(c_2\)) |
| SignallingCost | -100 | signaling cost coefficient \(c_1\) (cost = \(c_1 \times \text{max signal amplitude}\)) |
| Visibility | 10 | probability that one’s signal will be visible during an interaction |
Runaway signaling due to outrage
| This slow five-stage run shows how the population steadily climbs regularly spaced signal levels through time. It has been obtained by setting the benefit of being followed (\(s\)) to a small value. In typical runs (i.e. with normal values for \(s\)), intermediary stages are hardly marked, as top-quality (most motivated) individuals have an incentive to climb up the signal ladder as soon as an uniform signal has been reached or nearly reached. |
|
Obtained with default parameters (see above) except:
ContemptImpact -150 CostDecrease 7 FollowerImpact 2 JumpProbability 3 LearningSpeed 10 NumberOfGroups 10 PolicingCost -1 SignallingCost -120 |
|
Here we can see on the right ➜ how the population climbs up regularly spaced signal levels. At each transition, top-quality individuals (on the right of the horizontal axis) tend to be the first to climb, whereas lowest-quality individuals (on the left of the horizontal axis) tend to be the last. Red dots are outraged individuals; brown dots are their targets.
As a comparison, we can see on the left ← that in the absence of outrage, no runaway occurs. We are left with a basic separating equilibrium in which only the top-most motivated individuals send the signal. |
|
| Parameters used in this simulation
= default parameters (see above) except: |
ContemptImpact -100 (right) or 0 (left)
LearningSpeed 10 |
NumberOfGroups 10
SignallingCost -300 |